Readers via Slashdot, welcome! Note that the last major changes to this CMU student project website were in early 2005 when our team members were still graduate students at CMU. The version of Quasi described below (Quasi 1.0) was completed in April 2004 and was controlled by an Autonomous Software System. Since then, a second iteration of the robot (Quasi 2.0) has been developed, which is typically controlled by a Guided Control System (essentially making him a sophisticated puppet). At the end of the day, both the Autonomous System and Guided Control System can be run on both robots, though Quasi 1.0 is typically autonomous and Quasi 2.0 is typically guided.
For more recent information about Interbots' work, please visit our spin-off company's website at:
The hardware of the Interbots Platform currently consists of three major components: the animatronic figure, the kiosk in which the figure resides, and the show control hardware.
Quasi the Robot
The most visible component of the Interbots Platform is, of course, the custom-built animatronic character, "Quasi". Quasi is an expressive anthropomorphic humanoid robot with a slightly masculine appearance. In terms of physical construction, Quasi has more in common with a radio-controlled model aircraft than with a traditional robot. His armature utilizes a large number (27) of variously-sized Hitec hobby servo motors to move. The armature itself is machined out of lightweight aluminum. To facilitate the character's ability to express emotion, ten servos have been dedicated to movements of the eyes and eyelids alone. (In addition to telescoping in and out, each eye has an upper and lower eyelid that can be raised, lowered, and tilted diagonally to emulate the movement of eyebrows.) Hobby servos combine a DC rotational motor, a potentiometer for position feedback, and a motor control board in one tidy package. This, along with their low cost has made them increasingly popular in the field of robotics.
While our method of containing all servos inside the armature allows for Quasi to be quite compact, we are looking at iterating upon the design by moving all servos outside of the character and using sleeved push-pull cables to transfer the mechanical forces from a bank of servo motors to the armature itself.
Recent developments have introduced pre-recorded speech, but a substantial amount of his activity is non-verbal, instead relying expressive facial features and gestures. Quasi has a number of features in addition to his eyelids for conveying emotion, the most prominent of which are Color Kinetics LED lighting fixtures for his eyes and antennae. These combine red, green, and blue LEDs to display any color of the spectrum. His antennae can move both forward and backward as well as in and out, giving them an expressive quality not unlike that of a dog's ears. The physical movements of Quasi's eyelids, antennae, and body posture combined with changing LED colors allow him to effectively communicate emotions and personality without the use of speech. Now that silent emotional expression has been achieved, our current research is exploring the use of speech to augment expression.
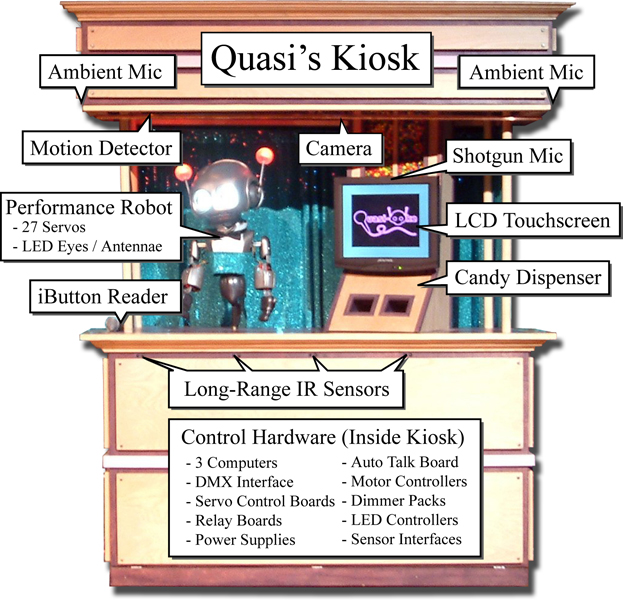
The Kiosk
Interactive experiences with the Interbots Platform involve more than just an animatronic figure alone. Quasi's environment - a kiosk that also contains a VGA touchscreen LCD monitor, long range IR sensors, a motion detector, a webcam, stereo speakers, directional microphones, lighting, and a candy dispenser - is just as much a part of the Quasi experience as the robot itself. The kiosk was designed to house Quasi and all of his support equipment in an attractive enclosure that could reside in a hallway at our facilities.
Although we were concerned about people touching Quasi and damaging him, we felt strongly about not having him behind glass or any sort of protective barrier. Without the sharing of a physical space, guests would be deterred from emotionally connecting to the figure. Fortunately, our concerns about damage were unnecessary-- unless Quasi holds an arm out as if to shake hands, most guests do not try to touch the figure.
 The kiosk provides information to Quasi through a variety of sensors. A motion detector, identical to those found in home security systems, alerts Quasi to movement in the wide environment. A set of five forward-facing infrared rangefinders allow Quasi to determine the positions of multiple objects located within five feet of the front of the kiosk. A camera mounted behind Quasi captures video for the face-tracking software, allowing him to direct his gaze towards guests. Stereo microphones mounted on the periphery of the kiosk listen to ambient noise levels and a shotgun microphone picks up speech for voice recognition. An iButton reader allows individuals to log in and be identified using a low-cost tag carried on keychains.
The kiosk provides information to Quasi through a variety of sensors. A motion detector, identical to those found in home security systems, alerts Quasi to movement in the wide environment. A set of five forward-facing infrared rangefinders allow Quasi to determine the positions of multiple objects located within five feet of the front of the kiosk. A camera mounted behind Quasi captures video for the face-tracking software, allowing him to direct his gaze towards guests. Stereo microphones mounted on the periphery of the kiosk listen to ambient noise levels and a shotgun microphone picks up speech for voice recognition. An iButton reader allows individuals to log in and be identified using a low-cost tag carried on keychains.
Quasi can enhance his environment with sound; stereo speakers mounted in the crown of the kiosk allow him to play speech and music. A nineteen-inch LCD touchscreen mounted to the right of the figure allows for intuitive interaction with questions, games, and other active content. Multiple channels of computer-dimmed lighting allow Quasi to manipulate the lights in his kiosk. Most importantly to the residents of our facilities, Quasi's kiosk features an automatic candy dispenser that holds forty-five pounds of Skittles and M&Ms behind clear plexiglass windows. The candy dispenser, while somewhat frivolous, has proved to be a unique and fun largesse that Quasi can use as an extra incentive to get people to interact with him.
The Control Hardware
Numerous show control components work together to bring Quasi to life, each of them responding to the DMX show control protocol. DMX is most traditionally associated with theatrical and club environments and the control of lighting fixtures, but in recent years its use has exploded to encompass fields as varied as architectural installations and the control of show hardware automation. The protocol is similar to MIDI in that it specifies a set number of serial channels (512) with a corresponding value for each (1-255). DMX devices listen to their assigned range of channels and respond accordingly. In Quasi, a single application (RSCS) commands a DMX chain that controls not only his movement, but the rest of his kiosk as well. Because of this, we can easily add any of the wide variety of DMX-capable devices on the market today without having to create new data classes or control methods in software.
The source of the DMX data is the Smart Jack 3 USB to DMX interface made by Color Kinetics. Specific devices attached to this interface include power supplies that illuminate the LEDs in his eyes and antennae. Two Gilderfluke SER-DMX Servo Control Boards support up to thirty-two hobby servos that make Quasi move. A DMX relay board made by Blue Point Engineering allows us to power Quasi on and off to "put him to sleep". Lighting dimmer packs allow Quasi to set an ambiance and selectively highlight parts of his kiosk. Pololu motor controller boards allow Quasi to turn through the use of a custom closed-loop servo actuation system.
One additional device, an auto-talk board, does not respond to a DMX command. Rather, it is fed a pre-recorded or live line level audio signal and it moves a servo (mounted on Quasi's jaw) in proportion to the signal's amplitude. The net effect is that Quasi appears to speak in time with the audio, without having to invest any time in pre-animating mouth movements.